clorep.f File Reference
Go to the source code of this file.
Functions/Subroutines | |
| subroutine | clorep (j, gb, q, p) |
Function/Subroutine Documentation
◆ clorep()
Definition at line 88 of file clorep.f.
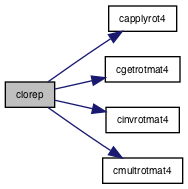
References capplyrot4(), cgetrotmat4(), cinvrotmat4(), cmultrotmat4(), d0, and g.
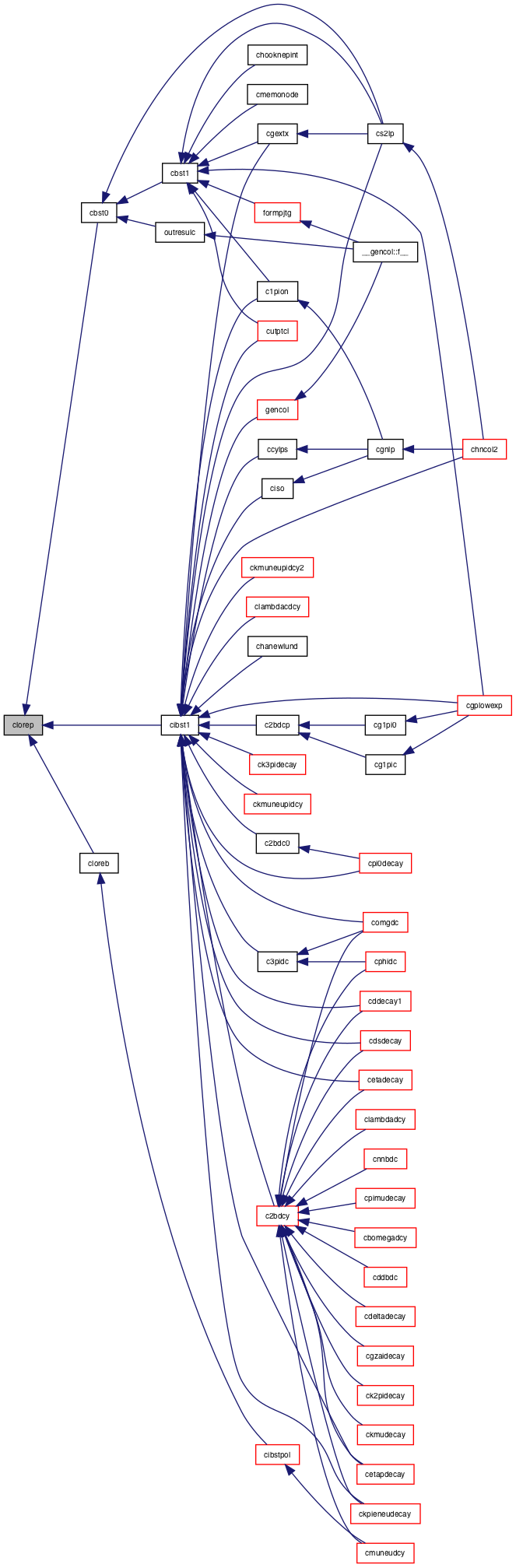
Referenced by cbst0(), cibst1(), and cloreb().
Definition: Zptcl.h:72
********************block data cblkHeavy ********************integer j data *HeavyG2symbol p
Definition: cblkHeavy.h:7
********************block data cblkHeavy ********************integer j data *HeavyG2symbol *data *HeavyG2code kiron data j
Definition: cblkHeavy.h:36
block data cblkEvhnp ! currently usable models data RegMdls ad *special data *Cekaon d0
Definition: cblkEvhnp.h:5
Definition: Zptcl.h:75
Here is the call graph for this function:
Here is the caller graph for this function: